How it works
One round: price staleness, bound the optimum, sense the gap.
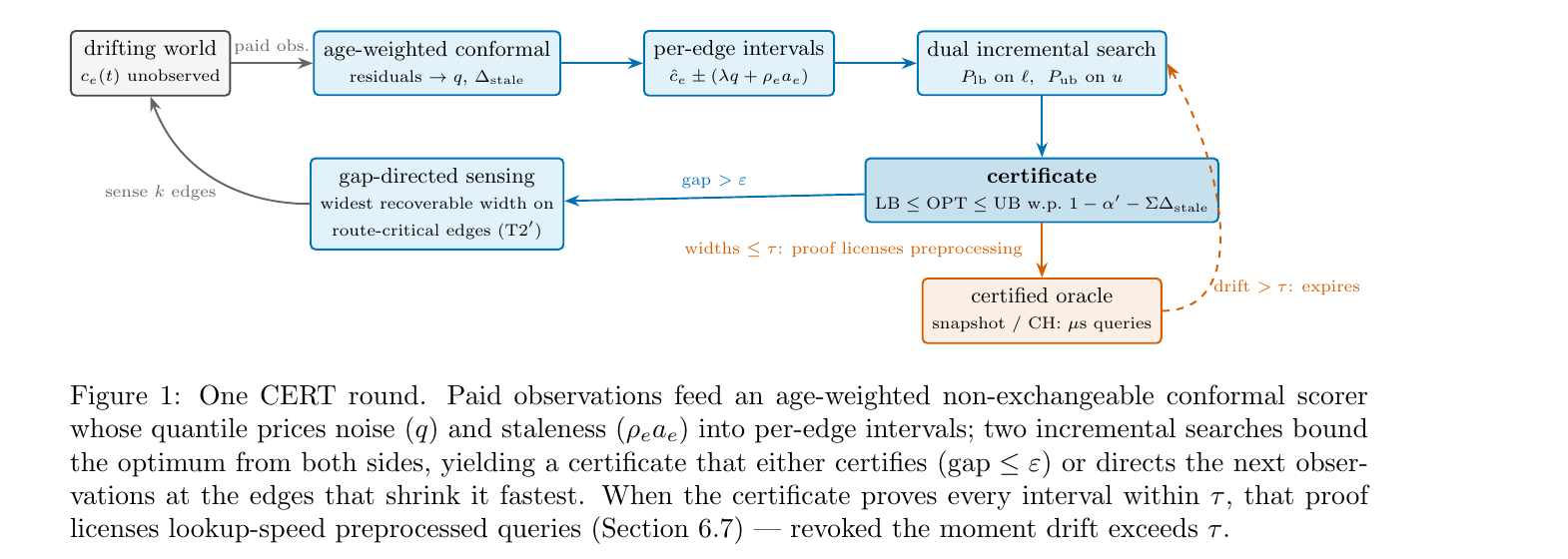
Each edge carries a point estimate, an observation age, and a drift-rate bound. Age-weighted non-exchangeable conformal prediction turns these into intervals that widen with staleness; two incremental searches bracket the optimum from below and above; the certificate either certifies (gap ≤ ε) or points the next sensor reading at the edge that shrinks the gap fastest. When the certificate proves the map is tight, that proof licenses lookup-speed preprocessing — revoked the instant drift exceeds tolerance.
Drift-adjusted residuals
Each paid observation is scored and weighted by age — exchangeability is never assumed.
ĉ ± (λq + ρ·age)
The conformal quantile pays for noise; the drift term pays for staleness.
Dual incremental search
An optimistic ℓ-search and a conservative u-search, repaired incrementally on a flat-array engine.
LB ≤ OPT ≤ UB
At an honestly-annealed confidence that degrades visibly as the map ages — weak claims, not silence.
Shrink the certified gap
Route-critical, churn-aware sensing — certification is a rate, not a state (Theorem T2′).
Gated preprocessing
When every interval is provably tight, an oracle / certified CH answers in ns–µs, revoked once drift exceeds τ.