Benchmarks¶
Every number below is measured, reproducible, and recorded with its command in
RESULTS.md, including
the honest limitations. Validation is held to the bar of the libraries splatreg sits beside
(gsplat / Theseus / GTSAM / SymForce). Core numbers validated 2026-06-07 (single box, CUDA);
the v1.2 additions (SH rotation, exposure compensation, render ladder, pose covariance) and
the v1.3 MAC verdict validated 2026-06-10.
Headline¶
| splatreg | reference | |
|---|---|---|
| Real-splat merge (real 103k-Gaussian capture) | Chamfer 10.3 → 2.0 mm (5.1×) · overlap 0.03 → 0.67 (22×) | naive concat |
| vs splat competitors (real splat, known GT Sim3) | 5.2° (SE3) · recovers scale (Sim3) | splatalign 15.3° · GaussianSplattingRegistration 36.3° |
| Sim(3) scale estimation | native | none of these do it |
| Object pose (YCB-CAD, 14 models × 4 poses) | ADD-S AUC 0.995, 100% < 2 cm | n/a |
| Camera localization (real splat, known perturbation) | median 5°/10 mm → 0.11°/1.35 mm, 11/12 converged | n/a |
| Official 3DMatch recall (1279 pairs, Choi/Zeng protocol) | 91.5% mean · 93.5% pooled | GeoTransformer ~92% · Open3D ~77% |
| Official 3DLoMatch (hard, 10–30% overlap) | 72.5% mean · 74.4% pooled | GeoTransformer ~74% · Open3D ~20% |
| Registration speed | ~17 ms (fast) · 104 ms (learned) | GeoTransformer ~50 ms · Open3D 142 ms |
merge pipeline on two real overlapping 3DMatch scans (7-scenes-redkitchen): register (SE(3), 0.58° / 17 mm vs the 3DMatch ground truth; seam gap 101 → 18 mm, overlap 0.27 → 0.82), then fuse + voxel-dedupe the double-covered seam (38,059 → 23,564 Gaussians). Measured this run. Regenerate: examples/make_merge_fusion_gif.py.Synthetic recovery (known-transform)¶
examples/validate_recovery.py: apply a known Sim(3)/SE(3), recover it.
3 seeds × {5°, 30°, 90°} × {0.8, 1.0, 1.3 scale}:
| Block | Success | median rot | median trans | median scale | median Chamfer |
|---|---|---|---|---|---|
| SE(3) (rigid) | 9/9 = 100% | 0.000° | 0.10 mm | n/a | 0.076 mm |
| Sim(3) (+scale) | 27/27 = 100% | 0.259° | 2.93 mm | 0.344% | 0.575 mm |
Jacobian audit¶
Every analytic Jacobian is checked against a tangent-space numerical one
(tests/test_jacobians.py, float64), the GTSAM EXPECT_CORRECT_FACTOR_JACOBIANS
discipline. The audit found and fixed a real bug: the Gaussian-SDF gradient had dropped
the first-order ∂q̃/∂p term; it is now an exact closed-form field gradient (max
|analytic − numerical| ≈ 1e-8). ICP point-to-point ~3e-9, point-to-plane ~4e-11; SE(3)/Sim(3)
exp/log round-trips exact to ~1e-13 including the near-π branch.
vs plain ICP (residual ablation)¶
| Method | SE(3) success | Sim(3) success |
|---|---|---|
| splatreg (full) | 9/9 | 27/27 = 100% |
| ICP (centroid init) | 9/9 | 9/27 = 33% |
| ICP (super-Fib init) | 9/9 | 9/27 = 33% |
Plain ICP cannot estimate scale: it fails every non-unit-scale cell. Honest flip side: on easy rigid SE(3), ICP is ~1000× faster; the SDF residual's value is scale + implicit-field robustness.
Robustness sweep¶
| Condition | Result |
|---|---|
| Noise (sensor jitter 0.5–2%) | 9/9, rot < 0.72° |
| Outliers (+10–50% clutter) | 9/9, rot ≈ 0° |
| Symmetric object (sphere) | 9/9 |
| Partial overlap (20–60% removed) | 4/9 solved + 5 flagged ambiguous, 0 silent-wrong |
Official 3DMatch / 3DLoMatch¶
Canonical Choi/Zeng protocol (1279 non-adjacent gt.log pairs, covariance-weighted error):
| Method | 3DMatch RR | RRE | RTE | 3DLoMatch RR |
|---|---|---|---|---|
splatreg learned (GeoTransformer seed + guarded refine) |
91.5% / 93.5% pooled | 1.81° | 0.071 m | 72.5% / 74.4% pooled |
splatreg learned, seed_selector="mac" (MAC cliques, same forward/refine) |
91.7% / 93.8% | 1.83° | 0.071 m | 72.1% / 74.6% pooled |
splatreg robust (classical Open3D seed) |
~67.1% | n/a | n/a | ~15% |
| GeoTransformer (published) | ~92% | n/a | n/a | ~74% |
| Open3D FPFH+RANSAC | ~77% | n/a | n/a | ~20% |
The refine is guarded (accepted only when it does not worsen the overlap residual): a per-pair audit found 0 pairs where it demoted a GeoTransformer success.
The seed_selector="mac" row is the measured answer to "does the MAC paper's ~71→78 %
3DLoMatch lift transfer?": no, a wash (every delta within ±4 pairs, ~+50 % runtime), because
at native voxel GeoTransformer's correspondences are already consensus-dominated (median
600–800 MAC inliers) and the guarded refine absorbs seed-level differences. lgr stays the
default; details in RESULTS.md §5k.
BUFFER-X zero-shot seed vs classical seed (real 3DMatch)¶
init="bufferx" swaps the learned seed for BUFFER-X (ICCV 2025), a single zero-shot model
that registers across sensors and scales with no per-dataset training. The BUFFER-X seed and the
classical robust FPFH seed are pushed through the identical splatreg refine, so the numbers
below isolate the seed rather than the pipeline. Recall counts a pair as recalled at
RRE < 15° and RTE < 0.3 m.
| Regime | BUFFER-X seed | classical robust seed | pair set |
|---|---|---|---|
| 3DMatch (n=1619) | 0.962 · median RRE 1.46° | 0.630 · 2.12° | complete official gt.log, 8/8 scenes |
| 3DLoMatch (n=1781) | 0.777 · 2.77° | 0.122 · 103.4° | complete official gt.log |
| 3DLoMatch regime, earlier GT-derived run (n=400) | 0.752 · 3.23° | 0.092 · 107.9° | 50/scene, .info.txt-derived |
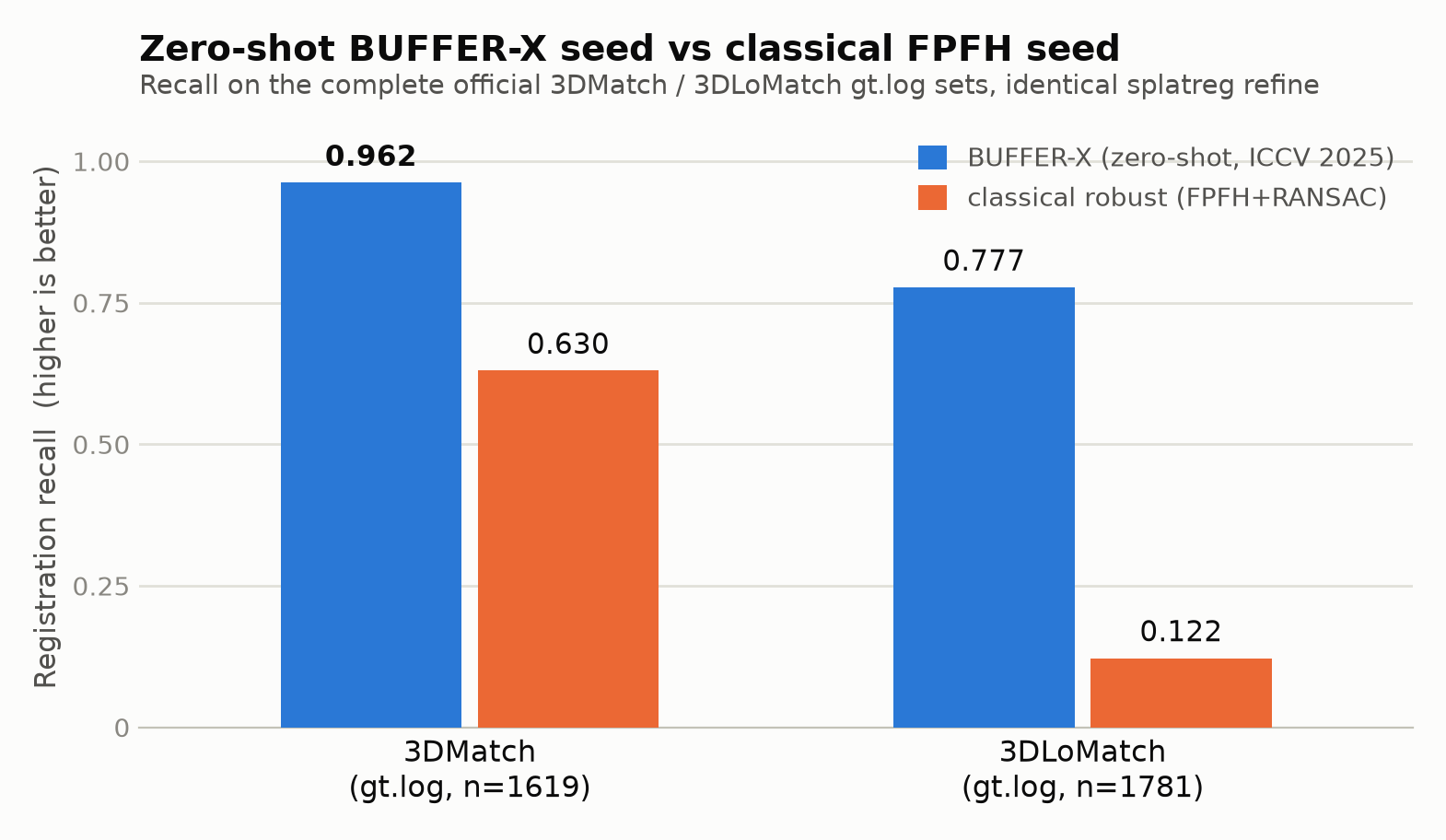
gt.log pair sets (3DMatch 8/8 scenes; official 3DLoMatch). Both seeds share the lighter feature_align refine — a fair head-to-head that isolates the seed rather than reporting full-pipeline absolute numbers. BUFFER-X wins every scene on both splits.Object pose (ADD / ADD-S)¶
YCB google_16k CAD models, 14 objects × 4 poses, BOP symmetry convention:
| Observation | ADD-S AUC (0–10 cm) | median ADD-S | ADD-S < 2 cm |
|---|---|---|---|
| full view | 0.995 | 0.32 mm | 100% |
| 40% occluded | 0.995 | 0.13 mm | 100% |
Most objects recover to 0.02–0.6 mm ADD at ~0.1° rotation. The ADD/ADD-S gap is the standard
symmetry story (cans/spheres have unobservable spin); sugar_box is the one honest failure
(a real 180° geometric flip that only texture can break).
Photometric refinement (new in v1.1)¶
The opt-in refine="photometric" stage, measured on three regimes (full table, scoping and
PhotoReg positioning: Photometric refinement; recorded runs:
benchmarks/photometric_refine_results.md):
| Case | Geometric register | + photometric refine |
|---|---|---|
| Rotation-symmetric colored sphere (mock renderer, CPU) | 6.0° → 11.2° (worse) | 2.2° |
| Real gsplat rasterizer (CUDA), from 5°/7 mm | n/a | 0.36°/0.5 mm in ~1.1 s |
| Dense-overlap real 103k pair, injected 2°/1.24 mm seam | 0.239°/0.26 mm in 56 s | +1.7 s, neutral |
Decisive when geometry under-constrains the pose (symmetry / texture-only DoF); neutral when dense overlap already pins it; floor set by render resolution (~0.3°). Hence opt-in.
examples/make_photometric_refine_gif.py.SH rotation, exposure compensation, ladder, covariance (v1.2)¶
Each addition ships with its measured evidence (full detail: RESULTS.md §5j):
| Addition | Evidence |
|---|---|
SH (f_rest) Wigner rotation |
rotated coefficients evaluated at d equal the originals at R⁻¹d, measured ~2.4e-15 in float64 (gate < 1e-5); D(R₁R₂) = D(R₁)D(R₂) exact; PLY round-trip exact (tests/test_sh_rotation.py) |
| Exposure compensation (default ON) | a ×1.3 + 0.05 source tint absorbs into the Sim(3) scale without it (0.10% → 3.99% scale error); with it: 0.47%, fitted gain ≈ 1/1.3; clean pair 0.01% (harmless) |
| Coarse-to-fine render ladder | from a 6° offset a cold 96 px rung stalls at 5.61°; the 32→64→96 ladder lands 2.55° at equal per-stage budget |
| Pose information / covariance | SPD on well-constrained solves, 2× noise → looser covariance, singular → None (tests/test_pose_covariance.py) |
validate_recovery.py --fast |
CPU smoke preset: 6/6 cells within gate in ~41 s (worst rot err 0.16°, worst scale err 0.14%) |

examples/make_sh_rotation_figure.py.Speed¶
| Path | splatreg | reference |
|---|---|---|
register(init="fast") |
~17 ms | n/a |
register(init="learned") |
~104 ms | GeoTransformer ~50 ms · Open3D 142 ms |
Tracker.track() warm start |
~17 ms/frame | n/a |
| Full Sim(3) cold registration | 2.4 s/cell | n/a |
Honest limitations¶
- Overlap ≤ 40% is genuinely ambiguous: flagged (
info["ambiguous"]), never silently wrong.mergeis designed for high-overlap captures. - Scale under thin overlap (~20%): the Sim(3) scale valley is flat; no algorithm can recover what the geometry doesn't carry.
- Rigid SE(3) cost: plain ICP reaches the same easy-case success far faster; use
Trackerfor real time.
Full detail, including the failure analyses: RESULTS.md.
Reproduce¶
git clone https://github.com/Archerkattri/splatreg.git && cd splatreg
pip install -e ".[test]"
python -m pytest tests/ -q # the suite (incl. Jacobian audit)
SPLATREG_DEVICE=cuda python examples/validate_recovery.py --device cuda
SPLATREG_DEVICE=cuda python benchmarks/robustness_bench.py --device cuda
SPLATREG_DEVICE=cuda python benchmarks/icp_baseline_bench.py --device cuda
SPLATREG_DEVICE=cuda python benchmarks/threedmatch_official_bench.py --split 3DMatch --init learned